











QR Code

About Us
Products
Contact Us

Phone

E-mail


Project Overview

This project aims to design an efficient and stable dump truck automatic charging system to meet the charging needs of customers under indoor production conditions in Shanxi region. The system needs to achieve unmanned operation and control of engineering vehicles, only completing the handling and automatic charging functions of points A and B to meet the continuous operation requirements of the production line.
system composition
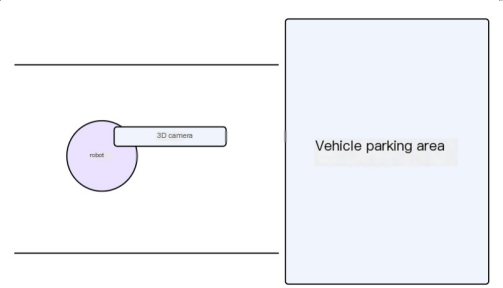
Visual positioning system: Utilizing high-precision cameras and visual algorithms to achieve precise positioning of the charging port on dump trucks. The visual system needs to have the ability to resist dust and direct sunlight, ensuring stable operation in various indoor environments.
Robots and Gun Pushing Mechanisms: Industrial robots with arm span of 3m or more are selected, equipped with specially designed gun pushing mechanisms. The gun pushing mechanism should have sufficient thrust and accuracy to ensure that the charging gun can be accurately and quickly inserted into the charging port.
Charging system: Equipped with high-power charging equipment of 3 megawatts, ensuring that the dump truck can be fully charged in a short period of time and improving production efficiency.
Control system: Through an integrated control system, precise control of visual positioning, robot motion, and charging process can be achieved. The control system should have high automation and intelligence characteristics, and be able to achieve unmanned automatic charging.
Workflow
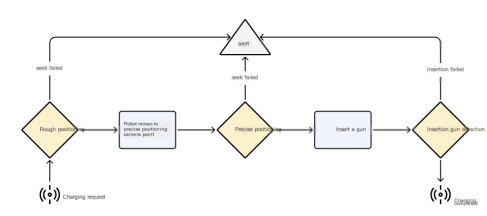
Self dumping truck positioning: Identify and locate the charging port position of the dump truck through a visual positioning system.
Robot motion: The control system guides the robot to move near the charging port of the dump truck based on visual positioning results.
Pushing gun insertion: The robot is equipped with a pushing gun mechanism, which accurately and quickly inserts the charging gun into the charging port of the dump truck.
Charging process: The charging system starts charging the dump truck until it reaches the preset power level or time.
Robot evacuation: After charging is completed, the robot will evacuate the charging port and wait for the arrival of the next dump truck.
key technology
Visual positioning technology: By using algorithms such as deep learning, the accuracy and stability of visual positioning systems can be improved.
Robot control technology: Optimize robot motion trajectory and speed to improve charging efficiency.
Design of the gun pushing mechanism: Ensure that the gun pushing mechanism has sufficient thrust and accuracy, while considering its structural compactness and reliability.
Risk response
Indoor environmental protection: Ensure a clean and dry indoor environment, reduce the impact of dust and direct sunlight on the visual positioning system.
Hardware maintenance: Regularly maintain and upkeep hardware such as robots and visual positioning systems to ensure their normal operation.
Professional evaluation: Invite professionals to evaluate and optimize the gun pushing mechanism, charging system, etc., to ensure the safety and feasibility of the solution.
