











QR Code

About Us
Products
Contact Us

Phone

E-mail


In the modern manufacturing industry that pursues efficiency, precision, and automation, the application of CNC machining technology is becoming increasingly widespread. However, the loading and unloading process of CNC machine tools often becomes a bottleneck that restricts production efficiency. In order to overcome this limitation, FUWEIi Intelligent has launched a composite robot CNC automatic loading and unloading solution, reshaping the production process and improving production efficiency and flexibility.
Project Overview
This project aims to achieve automatic loading and unloading of raw materials during CNC machining, as well as necessary inspection and cleaning processes. By introducing a composite AGV (Automated Guided Vehicle) robotic arm system, combined with scanning cameras and positioning vision cameras, precise and efficient material handling and process management can be achieved.
System composition
Composite AGV robotic arm system: includes key components such as AGV body, robotic arm, scanning camera, positioning vision camera, etc.
Control system: responsible for receiving task signals from the ② area equipment system, controlling the AGV robotic arm system to complete actions such as material grabbing, handling, and placement.
Scanning system: By scanning the QR code on the material tray with a scanning camera, material information can be entered and tracked.
Positioning system: Utilizing positioning vision cameras to achieve precise positioning and navigation of AGV robotic arm systems.
Workflow
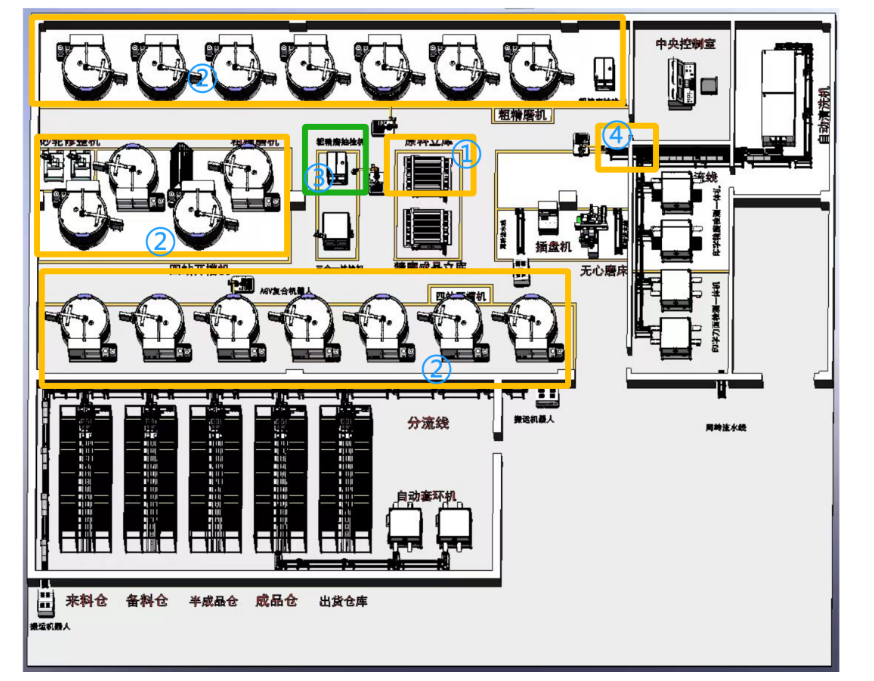
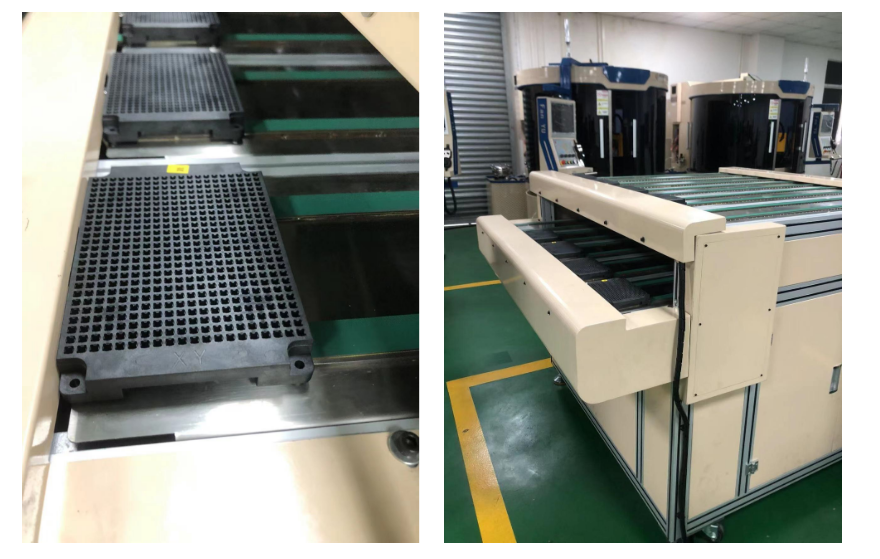
Raw material grabbing: The composite AGV robotic arm system goes to the first layer of the raw material storage to grab the materials to be processed according to the control system instructions.
Processing procedure: Deliver the captured materials to the machine in area ②, place them according to the internal placement position of the machine, and wait for processing.
Testing process (optional): If the system issues a testing request, send the mold disk from the testing position of the machine in area ② to the placement area of testing equipment in area ③ for testing. After the inspection is completed, send the mold disk back to the machine in area ②.
Cleaning process: Place the materials processed by the equipment in area ② on the conveyor line of the cleaning machine in area ④, and the material cleaning work will be automatically completed by the conveyor line.
Technical implementation
Composite AGV robotic arm system: adopting advanced AGV technology and robotic arm technology to achieve efficient and precise material handling.
Scanning system: using high-performance scanning cameras to ensure accurate input and tracking of material information.
Positioning System: Utilizing advanced visual positioning technology to achieve precise positioning and navigation of AGV robotic arm systems.
Control system: Adopting a reliable control system to ensure the stable operation and efficient cooperation of the entire system.
System advantages
High degree of automation: realizing automatic loading and unloading, detection and cleaning of raw materials in CNC machining process, improving production efficiency.
High precision: By using scanning cameras and positioning visual cameras, accurate input and precise positioning of material information can be achieved.
Strong flexibility: The workflow can be flexibly adjusted according to actual needs to meet different production requirements.
Strong traceability: By using a scanning system to track and trace material information throughout the entire process, the level of product quality management can be improved.
