











QR Code

About Us
Products
Contact Us

Phone

E-mail


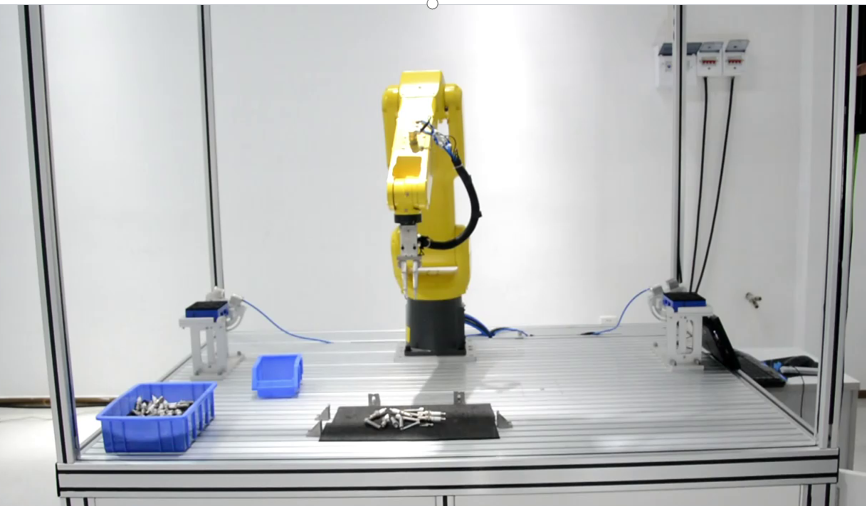
With the continuous improvement of manufacturing automation, a large automotive parts enterprise has proposed the need to use composite robots to complete bolt sorting in order to improve production efficiency and reduce labor costs. FUWEI Intelligent uses composite robots, combined with 3D industrial cameras and high-performance controllers, to achieve automatic bolt grasping, thereby improving the overall operational efficiency of the production line.
Project difficulties
1. High precision requirements: Bolts are small components that require robots to accurately identify and stably grasp, avoiding product damage or production line downtime.
2. Robots need to adapt to dynamic factors such as different shelf positions and changes in gripping points.
3. While ensuring the accuracy of ingredients, it is necessary to optimize the robot operation process and improve overall operational efficiency.

Solution
By utilizing 3D industrial cameras and high-performance controllers, robots can accurately locate bolt components and adjust grasping strategies in real-time through visual recognition, ensuring stability and accuracy.
The FUWEI intelligent integrated controller collects workshop signals to achieve seamless integration between robots and production lines. Multi axis simultaneous control, flexible adjustment of trajectory according to changes in the material rack and gripping points, adapting to dynamic environments.
Optimize the homework process, reduce waiting time, and improve grabbing efficiency. Set a reasonable homework cycle time and adjust the quantity of grabbing and assembly according to demand to meet the actual needs of the production line.
Action process:
After receiving the material grabbing request, the composite robot begins to move to the designated product position. Next, the robot will perform visual positioning to ensure accurate recognition and grasping of the product. During the positioning process, if the system detects that the number of products is less than the set value, it will trigger an alarm and attempt to reposition. If the positioning is successful, the robot will continue to perform grasping operations; If the positioning fails, it will move to the location of the next product and try again. After successful grasping, the robot will move the product to the unloading area to complete the unloading operation. Throughout the entire process, visual positioning and grasping are key steps, ensuring that the robot can efficiently and accurately complete the loading and unloading tasks.
Technical advantages:
Can adapt to drastic changes in environmental lighting and replace manual labor;
Intelligent robotic arm obstacle avoidance and trajectory planning algorithm based on deep learning for object detection and localization;
Can adapt to scenarios where multiple workpieces are produced simultaneously.
Core values:
Reduce costs and increase efficiency, improve stability, quickly put into production with simple operation, and quickly adapt to new products.
This plan will significantly improve the operational efficiency of the production line. Meanwhile, through precise positioning and grasping technology, the risk of product damage and production line downtime can be reduced, improving product quality and production stability. In addition, the adaptability to dynamic environments and efficient pace control will further enhance the flexibility and response speed of the production line, meeting the constantly changing production needs of GAC Toyota.
